Research Lines:
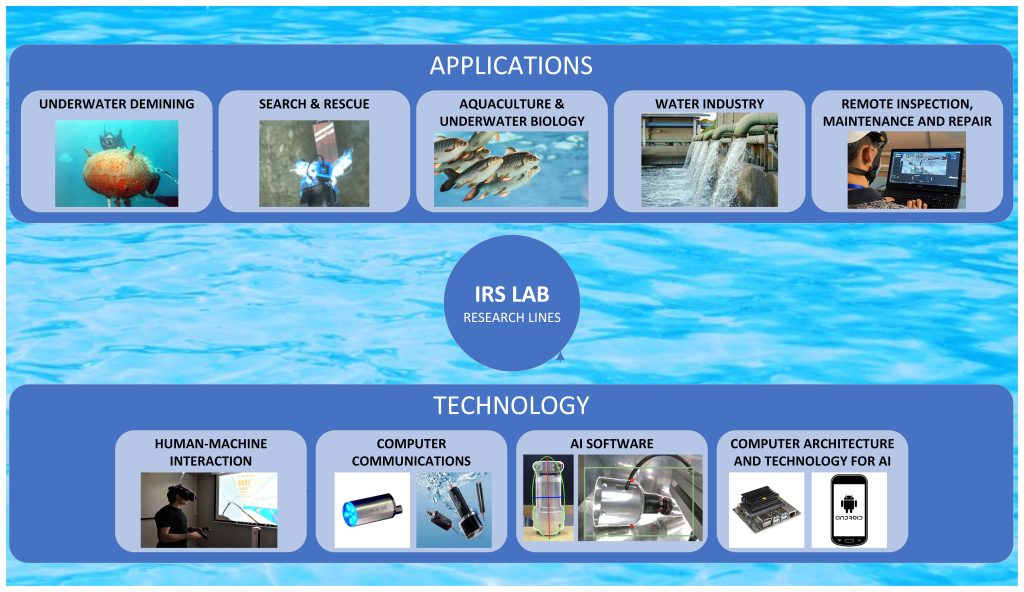
- Applications:
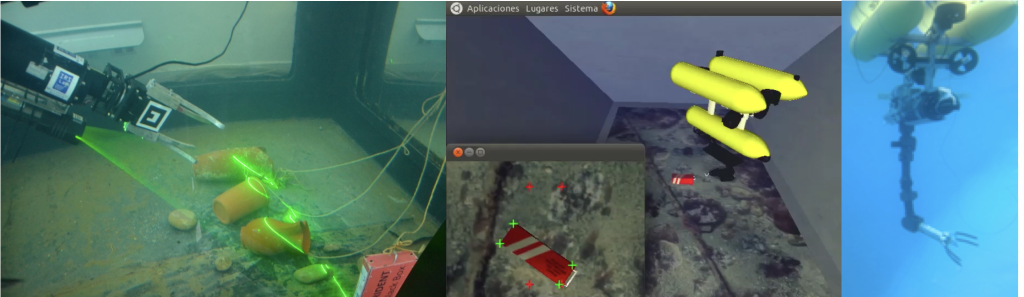
- Underwater Robotics Interventions with Mobile Manipulators
- Robotic Missions in Radioactive Scenarios (i.e. Accelerators at CERN)
- Computer Engineering Education Systems
- Medical Systems
- Industry 4.0
- Technology
- Human-Machine Interaction:
- 2D/3D User Interfaces for Telerobotics
- Remote Control of Computer-based Robotic Systems
- Multirobot & Multi-Operator Human-Robot Interaction
- Augmented Reality
- Virtual Reality
- Robotics Manipulation
- Grasping Determination
- Grasping Execution
- Multisensor techniques
- Computer Vision and Learning
- Computer Communications
- Underwater Wireless Communications (RF, Sonar, VLC)
- Internet protocols for Telerobotics (e.g. BTP)
- Network Automatic Control for Telerobotics
- Image Compression for Underwater Wireless Telerobotics (e.g. DEBT, Semantic Compression)
- AI Software
- Grasping Determination and Robotic Manipulation
- Computer Vision
- Visual Servoing for Robotic Control
- Neural Networks
- Computer Architecture and Technology for AI
- Embedded Systems
- Performance in Telerobotics
- Efficient systems for sustainability
- Human-Machine Interaction:
The main research objectives of CIRTESU-IRS Lab focus on advancing robotics and artificial intelligence technologies to address complex challenges in various fields, especially in underwater scenarios. Their work is particularly oriented toward underwater robotic interventions using mobile manipulators, robotics research in education, as well as robotic missions in radioactive environments, such as those found in particle accelerators at CERN, and in hospital nuclear treatments. In terms of technology, CIRTESU-IRS Lab emphasizes human-machine interaction, including the design of intuitive 2D/3D user interfaces for telerobotics, remote control of computer-based robotic systems, and support for multi-robot and multi-operator interactions through 3D mixed reality. Their semi-autonomous robotics manipulation efforts cover both grasping determination and execution, using multisensor approaches, alongside developments in computer vision and machine learning. In communication systems, in order to let the expert operator interact with the remote hazardous environment via a robot, they specialize in underwater wireless communications using RF, sonar, and visible light (VLC), and explore network protocols for telerobotics, as well as networked automatic control and image compression strategies, including semantic compression for very constrained communication links. Their AI software developments include neural networks, visual servoing, and efficient embedded systems supported by strong expertise in computer architecture and technology for AI. Moreover, CIRTESU-IRS Lab is committed to optimizing performance in supervised telerobotics while promoting sustainability through efficient system design.
History:
Robotics research at Universitat Jaume I began in the same year as its foundation (1991), developing new applications through innovation in Computer Engineering and Artificial Intelligence. The laboratory expanded (robot.uji.es) and was restructured in 2005, giving rise to IRS Lab (Interactive and Robotic Systems Lab) to address the growing need for robotic applications aimed at improving human safety in hazardous environments (e.g., water, radioactivity, fire).
IRS Lab specialized in the use of robots requiring physical interaction with remote environments, necessitating the application of Artificial Intelligence techniques (embedded computing), telecommunications, and advanced human-robot interfaces. The lab brought together experts in AI (computer vision and robotic manipulation), Communications, Computer Architecture and Technology, and Advanced Human-Robot Interfaces.
The first major steps in field robotics were taken with the EU FP6 GUARDIANS project, where robotic techniques were developed to assist firefighters in smoke-filled and explosion-risk scenarios. Soon after, research efforts expanded into the water domain, leading to national and international projects, with the EU FP7 TRIDENT project standing out as a milestone. Coordinated by IRS Lab, this project firmly established underwater robotics as a central application area.
In 2015, collaborations with CERN (European Center for Nuclear Research) began, where IRS Lab researchers contributed as remote-control experts, developing robots and teleoperation systems for radioactive environments. This agreement, currently extended until 2031, supports two ongoing PhD theses. In this field, the EU H2020 El-Peacetolero project is particularly noteworthy, integrating radiation robotics with marine robotics to enhance safety in Inspection, Maintenance, and Repair (IMR) tasks in radiation and water environments (e.g., inspection of water pipes in radioactive settings). Similarly, in 2020, robotic technology applications were initiated to improve nurse safety in nuclear medicine treatments for cancer therapy with brachytherapy, in collaboration with the Hospital Provincial de Castellón.
In 2018, IRS Lab coordinated the creation of a research consortium at Universitat Jaume I and the Torre la Sal Aquaculture Institute of CSIC (iats.csic.es). This initiative led to the establishment of CIRTESU (Center for Research in Robotics and Underwater Technologies) (cirtesu.uji.es) at Universitat Jaume I. CIRTESU became a unique research laboratory with 450 m² of facilities, including a 500,000-liter water tank dedicated to singular research projects, officially inaugurated in 2020.
Currently (2024-2026), CIRTESU is undergoing expansion, incorporating a hydrodynamic channel, prototyping workshops, and research laboratories, consolidating its research spaces and taking the first steps toward creating a research institute. This expansion includes activities in Robotics, Artificial Intelligence, Prototyping, Hydrodynamics, and Aquaculture.
CIRTESU is a young and growing research center, already leading impactful scientific and social projects such as ThinkInAzul and GVA-PROMETEO for consolidated research groups, aimed at improving animal welfare and worker safety in marine aquaculture farms. Additionally, IRS Lab plays a crucial role in academic training, being a pillar for educating future engineers and researchers through the bachelor’s degree in Intelligent Robotics (https://www.uji.es/estudis/graus/robotica/) and the Erasmus Mundus Master’s MIR in Marine and Maritime Intelligent Robotics (https://www.master-mir.eu/).