A agreement to collaborate with the CERN research center has been signed, in order to develop robotic systems able to operate in the difficult access tunnels in CERN subterranean infrastructures, especially in the Large Hadron Collider and SPS accelerators.
This is not an easy environment in which to operate, as there are space restrictions, limited light conditions and strong electro-magnetic fields.
As part of the agreement two PhD thesis have already been jointly performed, specially in the context of advanced human-robot interfaces for remotely controlling mobile manipulators.
Tasks of the project
1. Operator’s monitoring state: This work-package will concentrate on reducing human errors. The HRI will provide a system for monitoring the operator’s attention and state during the intervention.
2. Cooperative Interventions: This second task will focus on the enhancement of the current system, in order to be able to perform cooperative manipulation interventions, using the WIFI/4G/3G network to implement the team robotic operations.
3. Tunnel Global Localization System: In order to be able to design robot team operations, it is necessary to implement a real-time global localization system for humans and robots in the tunnel.
4. Efficient network protocol for supervisory control of robot teams: Once the global positioning system is able to work in a fast and reliable manner, next step will be the design of a cross-layer network protocol for robot team supervisory control, considering time-delay constraints in the bilateral control with force feedback, quality of transmission for high-level commands, as well as network congestion and geometric routing techniques for fast retransmission.
5. Improving robot sealing: Robot sealing for radioactive environments
Project started on:
06/12/2018
Project finishes on:
31/12/2031
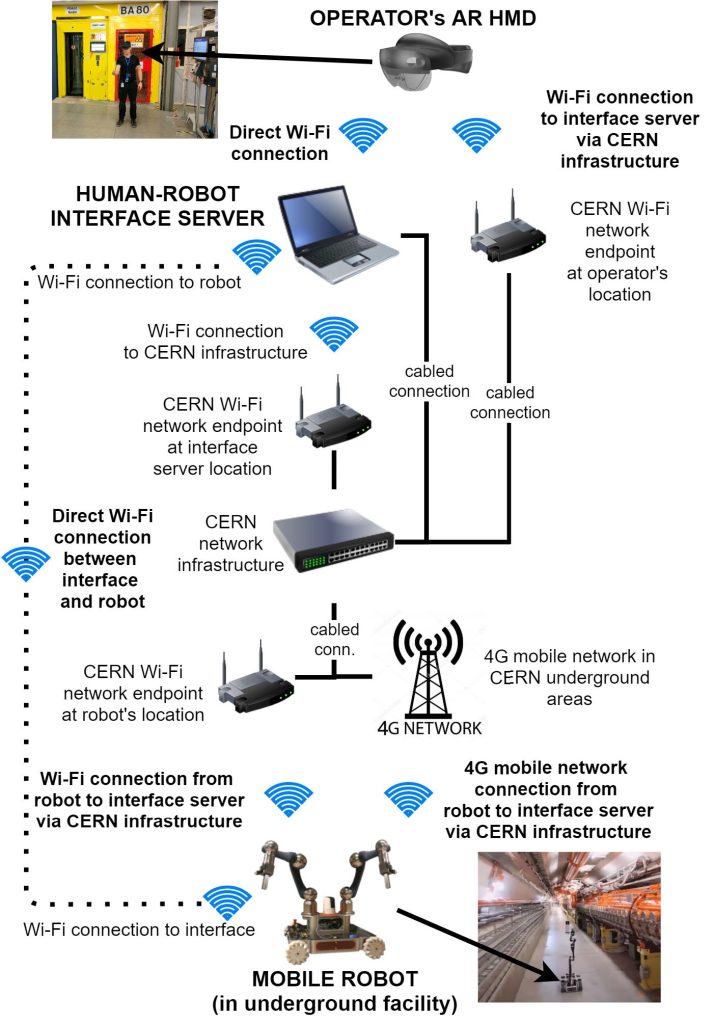
Image extracted from: