Multisensory Based Underwater Intervention through Cooperative Marine Robots
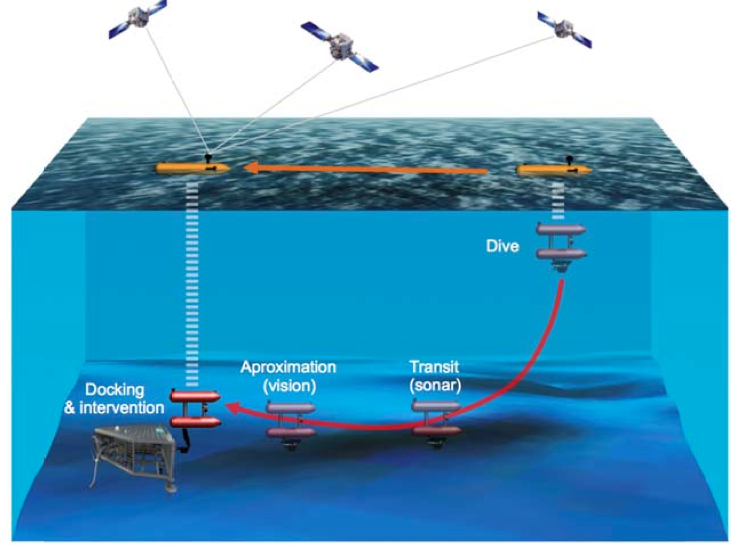
The main goal of TRITON is the use of autonomous vehicles for the execution of complex underwater intervention tasks. The project is focused on the use of several vehicles (an AUV and an I-AUV) running in a coordinated manner during the execution of a mission, and on the improvement of the manipulation capabilities already developed in RAUVI.
The project proposes two scenarios that demonstrate the capabilities to be developed: search and recovery of an object, and panel intervention in the context of underwater observatories, both to be developed autonomously.
Project start:
01/01/2012
Project end:
01/01/2015
TRITON is a marine robotics research project focused on the development of technologies really close to the real needs of the final user and, as such, it can facilitate the potential technological transfer of its results.
The scenarios chosen for the development and experimental validation of the project are: (1) “Search and Recovery” and (2) “Permanent Observatories”. Under (1) we will address the recovery of a typical airplane black box and under (2) we will carry out maintenance operations characteristic of permanent marine stations.
The project would not be viable without the technological developments reached by the ongoing national coordinated project under the DPI program entitled RAUVI, whose consortium is formed by the members that sign in the present proposal. Thanks to RAUVI, we count on a prototype of I-AUV from which, in only three years’ time, we can carry out substantial improvements at the functional and operative levels with an amount of research investment that we can realistically assume.
SUBPROJECTS:
| Project coordinated by |  |  |  |
| IP | Pere Ridao (Partner UdG) | Pedro J. Sanz (Partner UJI, Coordinator) | Gabriel Oliver (Partner UIB) |
| Sub-Project name | COMAROB DPI2011-27977-C03-02/DPI | GRASPER DPI2011-27977-C03-01/DPI | VISUAL2 DPI2011-27977-C03-03/DPI |
Acknowledgments
![]()
This research was partly supported by Spanish Ministry of Research and Innovation DPI2011-27977-C03.